Yi Liu
Hola! I'm a PhD at UGent AiRO-imec, where I am interested in promoting the robots integrate into human's daily life smarter and safer. My research focuses on robotic learning, which enables robots to intelligently interact with the world in which humans exist. Recently, I've been interested in how robots can interact with soft body more smoothly.
Bio Github

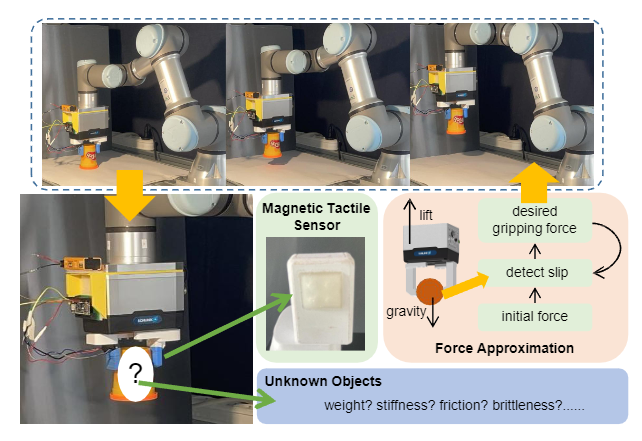
Gentle Grasping: A Method with Low-Cost Magnetic Tactile Sensors
Yi Liu, Remko Proesmans, Andreas Verleysen, Francis wyffels
IEEE Access
PDF
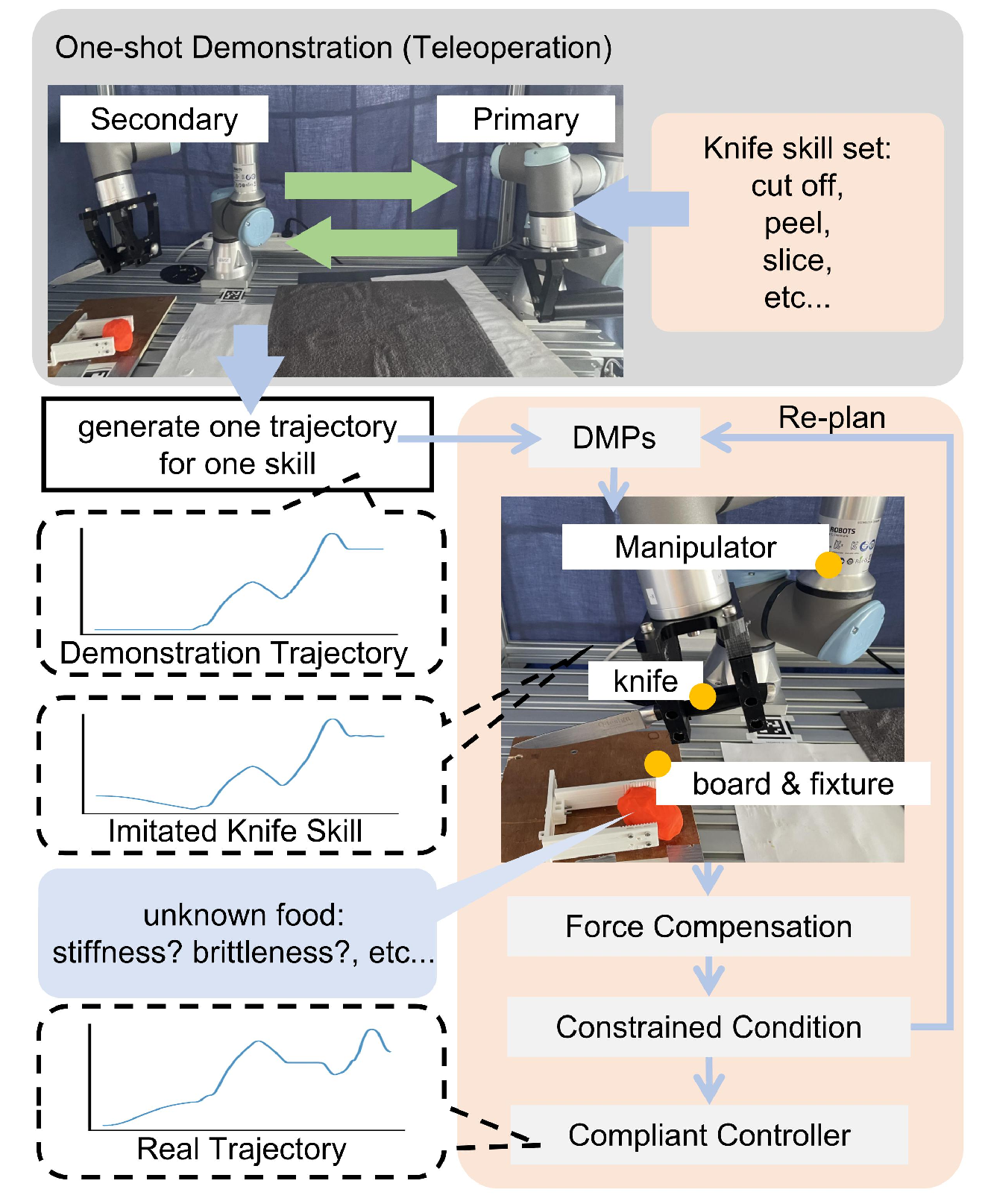
One-Shot Demonstration for Slicing and Cutting Everyday Food Items
Yi Liu, Andreas Verleysen, Francis Wyffels
IEEE Robotics and Automation Letters
PDF
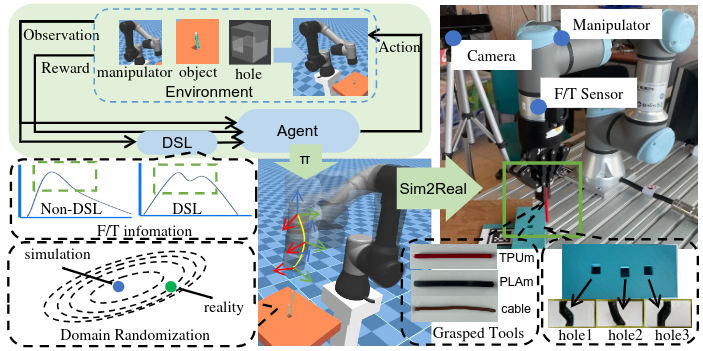
Compliant Robust Control for Robotic Insertion of Soft Bodies
Yi Liu, Andreas Verleysen, Francis Wyffels
IEEE Robotics and Automation Letters
PDF
Multi-fingered Tactile Servoing for Grasping Adjustment under Partial Observation
Hanzhong Liu, Bidan Huang, Qiang Li, Yu Zheng, Yonggen Ling, Wangwei Lee, Yi Liu, Ya-Yen Tsai, Chenguang Yang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
PDF
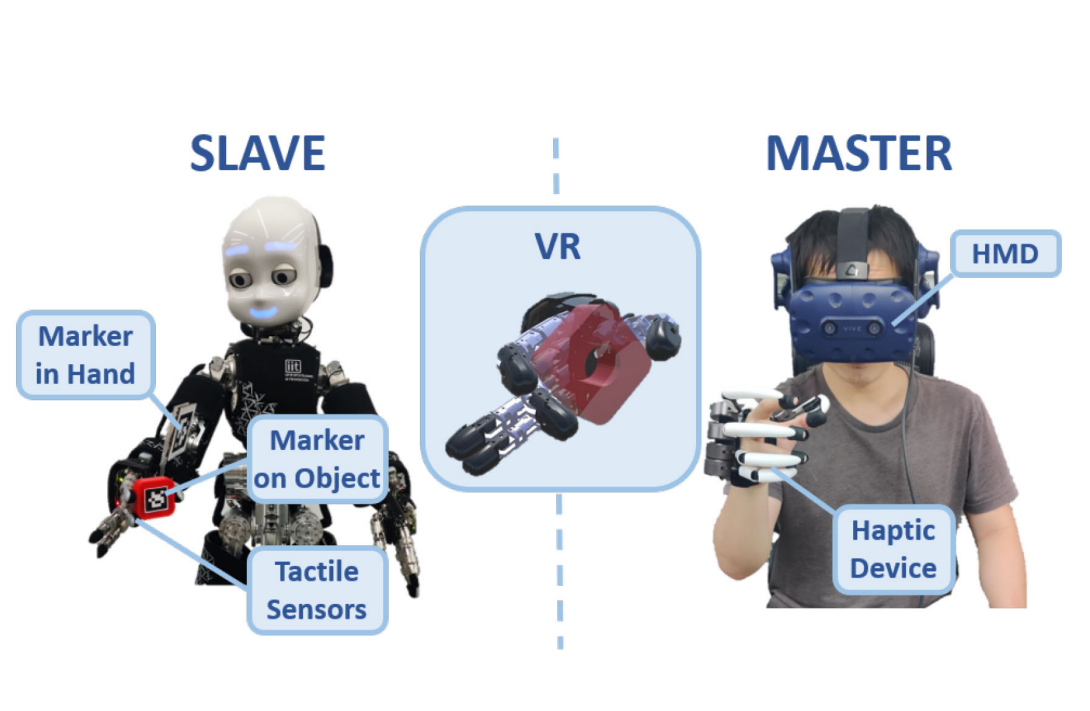
Virtual Reality Based Tactile Sensing Enhancements for Bilateral Teleoperation System With In-Hand Manipulation
Yi Liu*, Ya-Yen Tsai*, Bidan Huang, Jing Guo
IEEE Robotics and Automation Letters
PDF

Online Adaptive Identification and Switching of Soft Contact Model Based on ART-II Method
Yi Liu*, Di Wu*, Fengtao Han, Jing Guo, Zhaoshui He, Chao Liu
International Conference on Robotics and Automation (ICRA) 2022
PDF
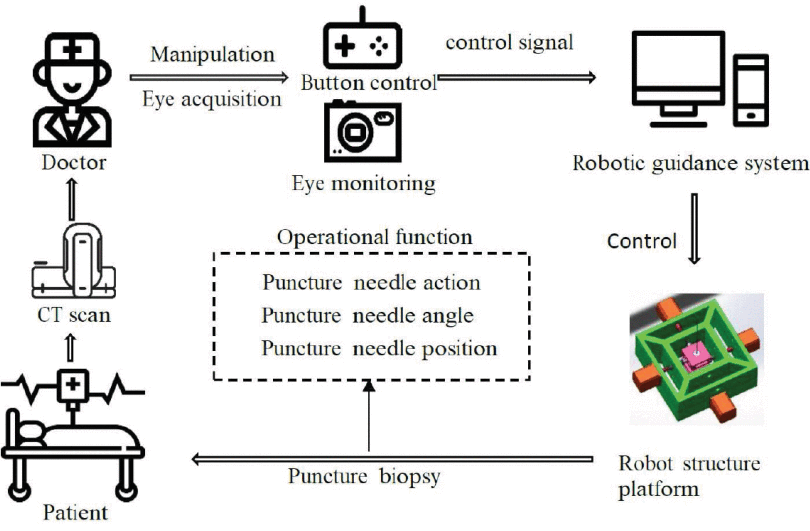
A Novel Robotic Guidance System With Eye-Gaze Tracking Control for Needle-Based Interventions
Jing Guo, Yi Liu, Qing Qiu, Jie Huang, Chao Liu, Zhiguang Cao, Yue Chen
IEEE Transactions on Cognitive and Developmental Systems
PDF
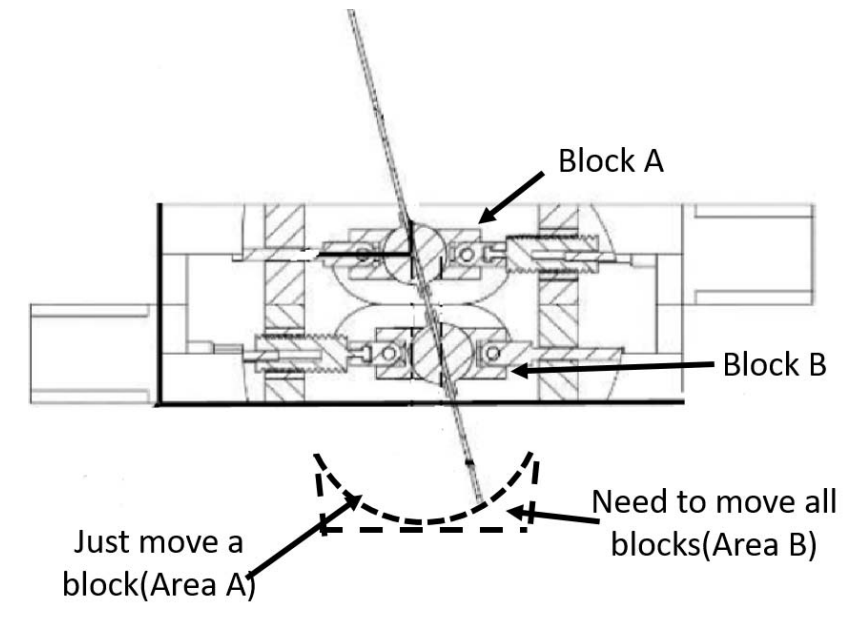
The Design and Control of Novel Needle Position Robotic System with Motion Uncertainties
Yi Liu, Jing Guo, Jiang Lan, Yujia Tang, Xinwei Chen, Xiaoming Xiong
5th International Conference on Advanced Robotics and Mechatronics (ICARM) 2020
PDF

The Design of Compact Robotic-Assisted Needle Position System with MPC-Based Remote Control
Jing Guo, Yi Liu, Jin Wang, Chao Zeng, Jie Huang, and Chao Liu
Complexity
PDF •
Code
2023
ICRA Workshop contribution A Robust and Safe Strategy for Robotic Assembly2024
IROS Oral Presentation Compliant Robust Control for Robotic Insertion of Soft Bodies (Transferred from RA-L)2025
CRAS contribution paper Lightweight Haptic Feedback for Teleoperation of Continuum Surgical Robots Based Solely on Actuation-Side Data2025
CRAS contribution paper Control of Continuum Surgical Robots based on Deep Reinformcement Learning2025
I'm going to the Medical Robotics Laboratory of University of Southern Denmark-MMMI for exchange study as Guest PhD Student.2025
Best Paper Award Finalist at the IROS 2025 Workshop - Embodied Intelligence for Medical Robotics: Learning, Adaption, and Interaction2026
Received the PhD degree from Ghent University - imec, IDLab!